Research
I'm interested in high-performance and differentiable solution methods for robot learning and optimal control.

Fast and Optimal Trajectory Planning for Multiple Vehicles in a Nonconvex and Cluttered Environment: Benchmarks, Methodology, and Experiments
International Conference on Robotics and Automation (ICRA), 2022
Proposed adaptive-scaling constraints for Multi-vehicle Trajectory Planning (MVTP) problems, enabling evaluation of optimal solutions through decoupled iterations, addressing the computational challenge introduced by multiple vehicles.
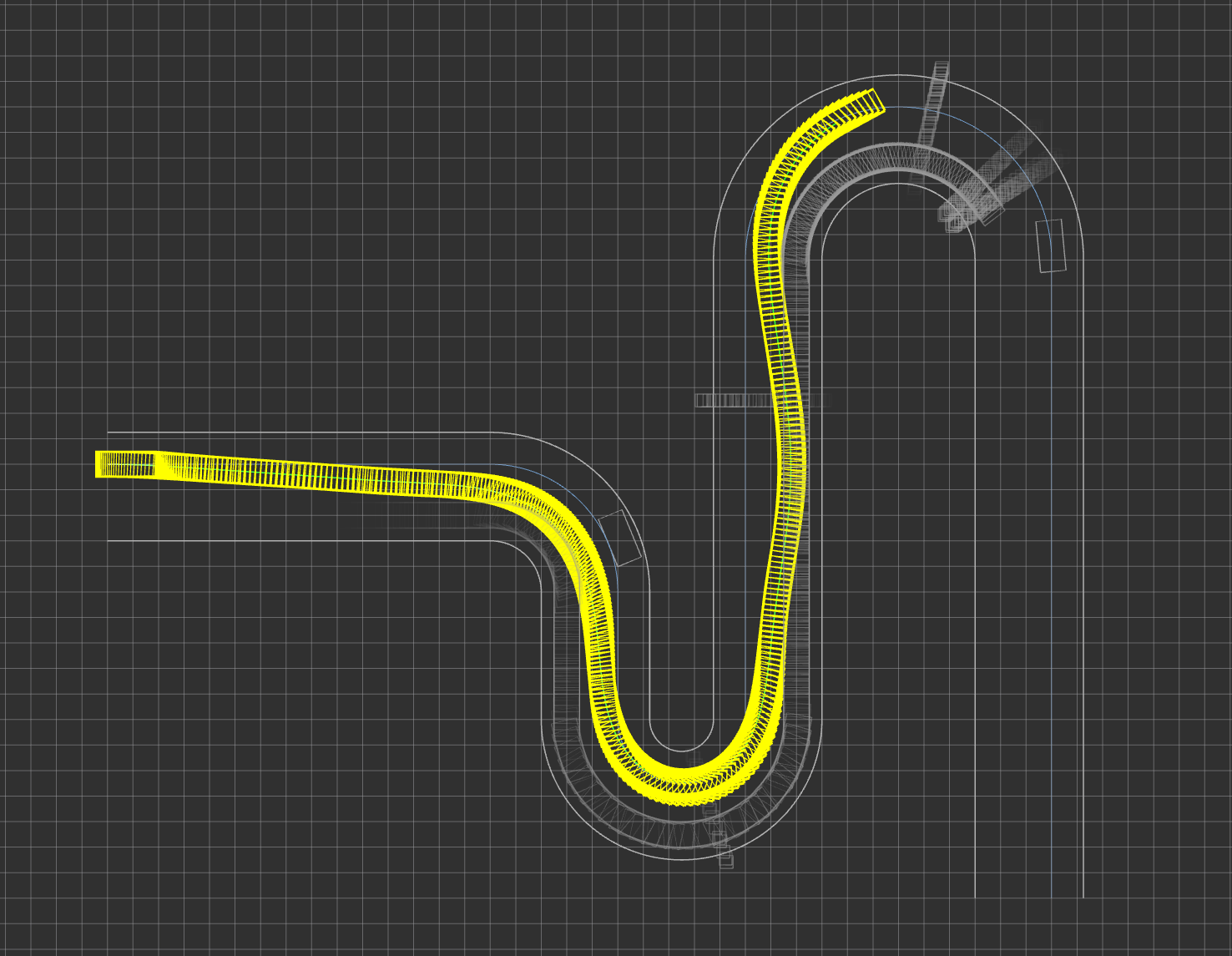
Autonomous Driving on Curvy Roads Without Reliance on Frenet Frame: A Cartesian-Based Trajectory Planning Method
IEEE Transactions on Intelligent Transportation Systems, 2022
Proposed a hierarchical planning approach for on-road autonomous driving, where an S–L–T dynamic programming framework generates a series of convex sets, and a lightweight iterative optimization method plans the vehicle’s motion in Cartesian space.

Mixed-integer and Conditional Trajectory Planning for an Autonomous Mining Truck in Loading/Dumping Scenarios: A Global Optimization Approach
IEEE Transactions on Intelligent Vehicles, 2023
Proposed a coarse-to-fine approach to solve complex mixed-integer nonlinear program for heavy-duty trucks, a search-based method find a near-optimal coarse trajectory satisfying mixed-integer costs and constraints, which is further polished with a small-scale NLP simplified from original mixed-integer problem.